
Аннотация
Технологии точного земледелия позволяют существенно повысить качество и объемы продукции, при этом снижая негативное воздействие на окружающую среду. Достигается это за счет внесения оптимальных доз агрохимикатов на каждом элементарном участке поля благодаря совместному использованию данных дистанционного зондирования, агрохимических, метеоданных и др., а также благодаря модернизации сельскохозяйственной техники (применение бортового компьютера, датчиков, системы параллельного вождения и т.п.). Целью исследования являлась разработка комплекса подходов для информационного и инструментального обеспечения технологий дифференцированного внесения агрохимикатов с использованием отечественных готовых решений, а также открытых библиотек и программ. Объектом исследования являются два опытных сельскохозяйственных поля, которые входят в состав биополигона Агрофизического института (произрастающие культуры – зерновые). Эксперименты проводятся с 2019 года с использованием отечественной беспилотной авиационной системы Геоскан 401. Результатом информационного обеспечения агротехнологии представляется специализированная карта-задание, которая загружается в бортовой компьютер сельскохозяйственной техники для последующего внесения определенной дозы азота на каждом элементарном участке. Карта строится на основе выделения однородных технологических зон методами контролируемой классификации. На заключительном этапе реализации предложенного подхода важной составляющей является система параллельного вождения, позволяющая наиболее эффективно охватывать территорию (без пропусков, без двукратного внесения в одну и ту же зону). В качестве базы для создания прототипа аналоговой системы параллельного вождения была выбрана открытая технология AgOpenGPS с бесплатным программным обеспечением. С 2019 года для представленных опытных сельскохозяйственных полей было собрано и обработано более 20 000 исходных снимков. В результате для применения методов машинного обучения с целью выделения однородных технологических зон были сформированы более 20 многослойных ортофотопланов. Отработан предложенный подход по информационному обеспечению дифференцированных технологий, а также реализован и протестирован прототип отечественного аналога системы параллельного вождения.
Введение
Обеспечение продовольственной безопасности является актуальной проблемой, тем более в условиях таких отягощающих факторов, как экономический кризис, пандемия, рост мирового населения, санкционное давление и т.п. Технологии точного земледелия (ТЗ) позволяют максимизировать урожайность и качество продукции, при этом минимизируя расход ресурсов и негативное воздействие на окружающую среду. Развитие информационных технологий способствует появлению принципиально новых подходов решения задач ТЗ: геоинформационные системы, базы больших геопространственных данных, интернет вещей и др.
В агропромышленном комплексе активно применяются удобрения и пестициды, для зерновых культур существенную долю вносимых агрохимикатов составляют азотсодержащие удобрения. При этом несмотря на высокий уровень научно-технического развития агротехнологий внесение удобрений и пестицидов часто представляется малоэффективным (нарушаются дозы внесения, некорректно используются методики внесения и т.п.). В связи с этим актуальным направлением исследований является развитие методов и инструментария информационного обеспечения технологий дифференцированного применения агрохимикатов, которые позволяют автоматизировать ряд важных процессов производства растениеводческой продукции.
Для реализации агроопераций ТЗ, в первую очередь, необходимо решать задачу оценки обеспеченности растений полезными веществами (например, азотом). В этом направлении хорошо себя зарекомендовало использование высококачественных данных аэрофотосъемки. Для построения карт-заданий с целью последующего дифференцированного внесения удобрений применяются различные методы искусственного интеллекта (регрессионный анализ, машинное обучение, нейросетевые технологии и т.п.). Соответственно, в связи с тем, что исходная информация представлена в качестве больших геопространственных данных, возникают дополнительные этапы реализации технологий ТЗ: создание специализированных баз, геоинформационных и интеллектуальных систем и т.п.
В результате полученная карта загружается в бортовой компьютер трактора для последующего дифференцированного внесения агрохимикатов. На этом этапе реализации подхода возникает дополнительная задача, связанная с эффективным управлением техникой. Известно, что качество планирования пути, выполнения разворотов и т.п. существенно влияет на потери урожайности. Применение автоматизированных систем параллельного вождения позволяет избежать агротехнологических ошибок и оптимально использовать имеющиеся ресурсы. Зарубежные коммерческие решения хорошо себя зарекомендовали (например, Topcon, Amazon), однако для их внедрения в России существуют серьезные препятствия: санкционное давление, работа на базе зарубежного программного обеспечения, отсутствие поддержки пользователей, геопространственное ориентирование по GPS и т.п. Даже несмотря не бурное развитие этого направления в зарубежных исследованиях разработки собственных систем остаются актуальной проблемой. В отечественной индустрии также появляются предложения (например, Агронавигатор), однако и они имеют ряд недостатков: дороговизна, сложность настройки, низкий уровень сопровождения, отсутствие развитой сети сервисных центров и т.п. В Агрофизическом научно-исследовательском институте (АФИ) с 2019 года для проведения исследований, связанных с дифференцированными технологиями внесения агрохимикатов, проводятся попытки использования отечественного аналога, однако выявленные негативные аспекты указывают на актуальность разработок в этом направлении.
Таким образом, внесение оптимальных доз удобрений на каждом элементарном участке поля достигается, прежде всего, благодаря совместному использованию данных дистанционного зондирования, агрохимических, метеоданных и др., а также благодаря модернизации сельскохозяйственной техники (применение бортового компьютера, датчиков, системы параллельного вождения и т.п.).
Целью данного исследования являлась разработка комплекса подходов для информационного и инструментального обеспечения технологий дифференцированного внесения агрохимикатов с использованием отечественных готовых решений, а также открытых библиотек и программ.
Объекты и методы
Объектом исследования являются несколько опытных сельскохозяйственных полей, которые входят в состав многопрофильного комплекса, расположенного в Ленинградской области (д. Меньково, Гатчинский р-н), состоящего из 29 полей общей площадью 538 га. Большая часть территории биополигона занята экспериментальными исследованиями, согласно принятой в АФИ нумерации полей для решения задач, связанных с технологиями точного земледелия, задействованы 9 и 26 поля, 23,5 га и 39 га соответственно (рис. 1). Основные произрастающие культуры на этих полях – зерновые. Научно-исследовательские работы данного направления проводятся на этих участках с 2019 года, также отрабатывались технологии точного земледелия в период с 2006 до 2012 года.

Рисунок 1. Два опытных сельскохозяйственных поля, входящих в состав биополигона АФИ (Ленинградская обл., Гатчинский р-н, д. Меньково)
Все исследования в области дифференцированного внесения агрохимикатов осуществлялись на примере азотных удобрений в связи с тем, что они являются основным видом управленческого воздействия на продукционный процесс зерновых посевов. Для построения необходимых карт-заданий был выбран метод выделения однородных технологических зон по аэрофотоснимкам, как наиболее изученный и оперативный.
Для применения методов машинного обучения и получения более точных результатов оценки обеспеченности посевов азотом необходимо также формирование тестовой (обучающей) выборки. С этой целью ежегодно в период проведения многолетних опытов на каждом поле дополнительно закладывались так называемые тестовые площадки, которые представляют из себя ровные небольшие участки посевов с известной контролируемой дозой азота (рис. 2). Оптические показатели таких растений используются в качестве эталонных.

Рисунок 2. Тестовые площадки, размещенные на 26 опытном поле экспериментального комплекса АФИ (дата съемки: 23 июня 2022 г., культура: яровая пшеница), указанные числа – кг действующего вещества на 1 га
Таким образом, крайне важным этапом реализации технологий дифференцированного внесения удобрений является сбор и подготовка данных аэрофотосъемки, во многом точность результатов построения карты-задания зависит от корректности и качества исходного датасета.
Помимо информационного обеспечения таких технологий актуальной остается и инструментальная часть: беспилотный летательный аппарат (БЛА) для проведения аэрофотосъемки и система параллельного вождения для эффективной работы сельскохозяйственной техники. В опытах, связанных с дифференцированными технологиями, которые проводились в период с 2006 до 2012 года, в АФИ использовался радиоуправляемый самолет собственной сборки. Несмотря на то, что он позволял получать снимки высокого качества в видимом и ближнем инфракрасном диапазоне, имелись и существенные недостатки: необходимость дополнительной обработки изображений, геопространственная привязка осуществлялась только по наземным реперным точкам и т.п. В России в последние десятилетия производство БЛА наладилось и для гражданских сфер применения, при этом представленные на рынке предложения обладают высокой конкурентоспособностью в мировом масштабе. На основе анализа отечественных разработок в 2015 году была приобретена беспилотная авиационная система (БАС) Геоскан 401 (рис. 3), благодаря которой значительно выросло качество подготовки датасетов.
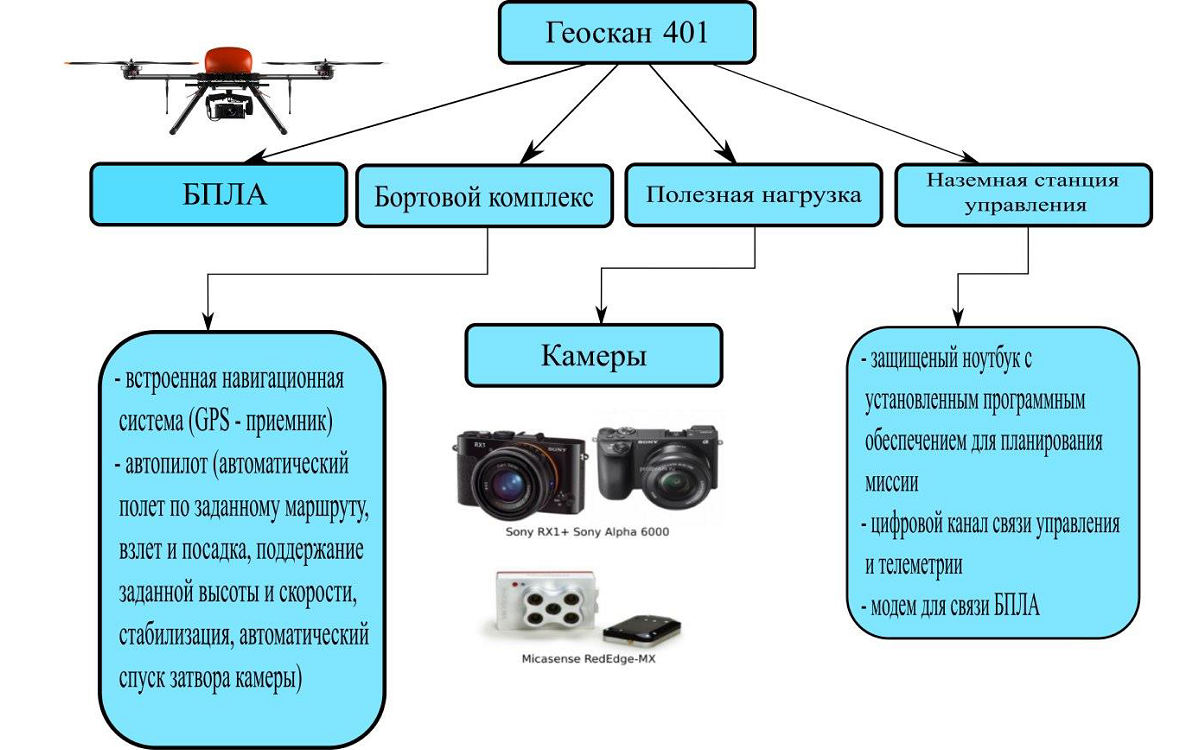
Рисунок 3. Беспилотная авиационная система Геоскан 401 (г. Санкт-Петербург)
Сбор данных аэрофотосъемки осуществляется в соответствии с выработанным алгоритмом: выбор даты полета в зависимости от погодных условий, подготовка оборудования, построение плана полета, сопровождение полета и т.п. Предварительная обработка полученных мозаик снимков выполняется в программе Metashape (поставляется в комплекте с БАС), в результате которой формируются высококачественные геопривязанные ортофотопланы.
В отличие от БЛА отечественное производство систем параллельного вождения имеет ряд недостатков: дороговизна, ограниченный выбор производителей, техническое обслуживание на низком уровне и т.п. При этом в связи с возникшим санкционным давлением и экономическим кризисом у многих потенциальных покупателей возникли непреодолимые сложности с покупкой зарубежных решений, а обладатели таких систем столкнулись с проблемой дальнейшего обслуживания. В связи с этим актуальной остается задача разработки своего аналога, адаптированного для использования на отечественной сельскохозяйственной технике. На основе анализа существующих подходов для подобных разработок в качестве базы для создания прототипа аналоговой системы параллельного вождения была выбрана открытая технология AgOpenGPS с бесплатным программным обеспечением.
Результаты и обсуждение
С 2019 года для представленных опытных сельскохозяйственных полей было собрано и обработано более 20 000 исходных снимков. В результате для применения методов машинного обучения с целью выделения однородных технологических зон были сформированы более 20 многослойных ортофотопланов, в том числе более 10 размеченных. Каждый элемент датасета с обучающей выборкой состоит из семи слоев: красный, зеленый, синий, ближний инфракрасный, красный край, карта распределения индекса NDVI (Normalized Difference Vegetation Index), а также shape-слой с тестовыми площадками, где каждой площадке назначен соответствующий атрибут (известная доза азота).
Предобработанный ортофотоплан на следующем этапе используется для выделения однородных технологических зон, при этом ввиду универсальности датасета могут применяться различные методы, в том числе и искусственного интеллекта. На рисунке 4 представлен пример контролируемой классификации (с обучением) на основе машинного обучения (метод минимальных расстояний) для 9го поля, дата съемки: 02.07.2021, произрастающая культура – яровая пшеница.
На следующем этапе на основе полученного результата создается специализированная карта-задание, которая загружается в бортовой компьютер сельскохозяйственной техники и вносятся соответствующие дозы удобрения на каждый элементарный участок поля (размеры сетки задаются в зависимости от ширины захвата разбрасывателя).
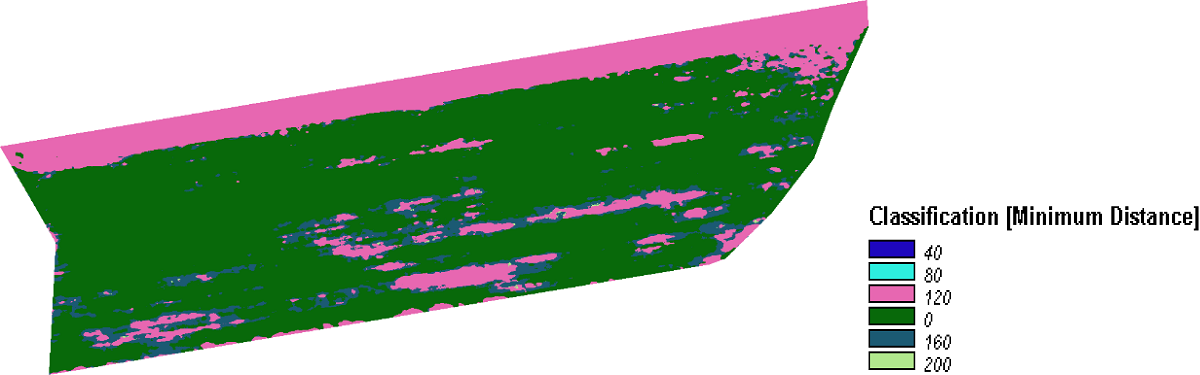
Рисунок 4. Пример выделения однородных технологических зон методом минимальных расстояний (поле 9, дата съемки: 02.07.2021, культура – яровая пшеница)
Как уже упоминалось выше, на заключительном этапе реализации дифференцированной технологии внесения удобрений важной составляющей является система параллельного вождения, позволяющая наиболее эффективно охватывать территорию (без пропусков, без двукратного внесения в одну и ту же зону). В ходе представленного исследования одной из целей ставилась сборка прототипа зарубежного аналога. Для решения этой задачи были выполнены следующие этапы:
- Сборка блока управления. Была выбрана схема платы, позволяющая взаимодействовать с мотором, сеялкой, разбрасывателем и датчиками ориентации в пространстве – минимальный необходимый набор для реализации технологий точного земледелия. Базовая плата была изготовлена по индивидуальному заказу в компании Resonon. После этого были подобраны компоненты, удовлетворяющие требуемым характеристикам, осуществлена сборка всех элементов в один блок.
- Выбор датчиков. Для реализации функционала системы были выбраны три основных датчика: угла поворота, а также два датчика ориентации в пространстве (девятиосевой IMU, RTK Rover).
- Сборка механизма передачи на руль. Основные элементы, которые были подготовлены на данном этапе: мотор 12 В с редуктором, шестерни передачи на руль (были распечатаны из пластика на 3D-принтере Flying Bear Ghost 5), а также сам руль.
- Настройка бортового компьютера. Для прототипного образца был приобретен планшет Dell Latitude 7285, на котором была установлена и настроена бесплатная программа с открытым исходным кодом AgOpenGPS.
- Тестирование прототипа. На завершающем этапе был осуществлен сбор всей системы (на рисунке 5 представлены элементы системы по отдельности), а также настройка комплекса. Предварительное тестирование было проведено в лабораторных условиях, протестированы отклики датчиков, пыле- и влагозащитные свойства блока управления, прочность шестерен, а также отработка всей системы на имитационных маршрутах. Все задачи были выполнены комплексом корректно.
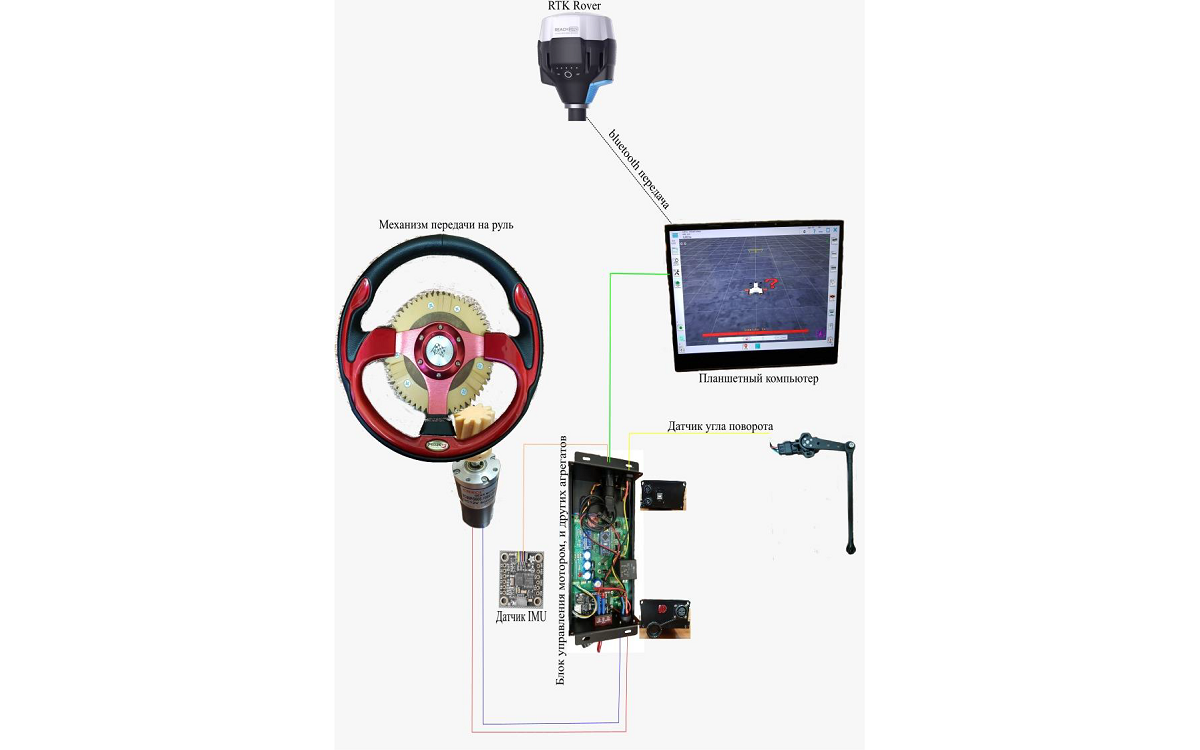
Рисунок 5. Элементы прототипа системы параллельного вождения на основе открытых технологий
После полевых тестирований, а также модернизации системы для корректной работы на отечественной сельскохозяйственной технике, получим полноценную практическую реализацию предлагаемого комплекса информационного и инструментального обеспечения (рис. 6).
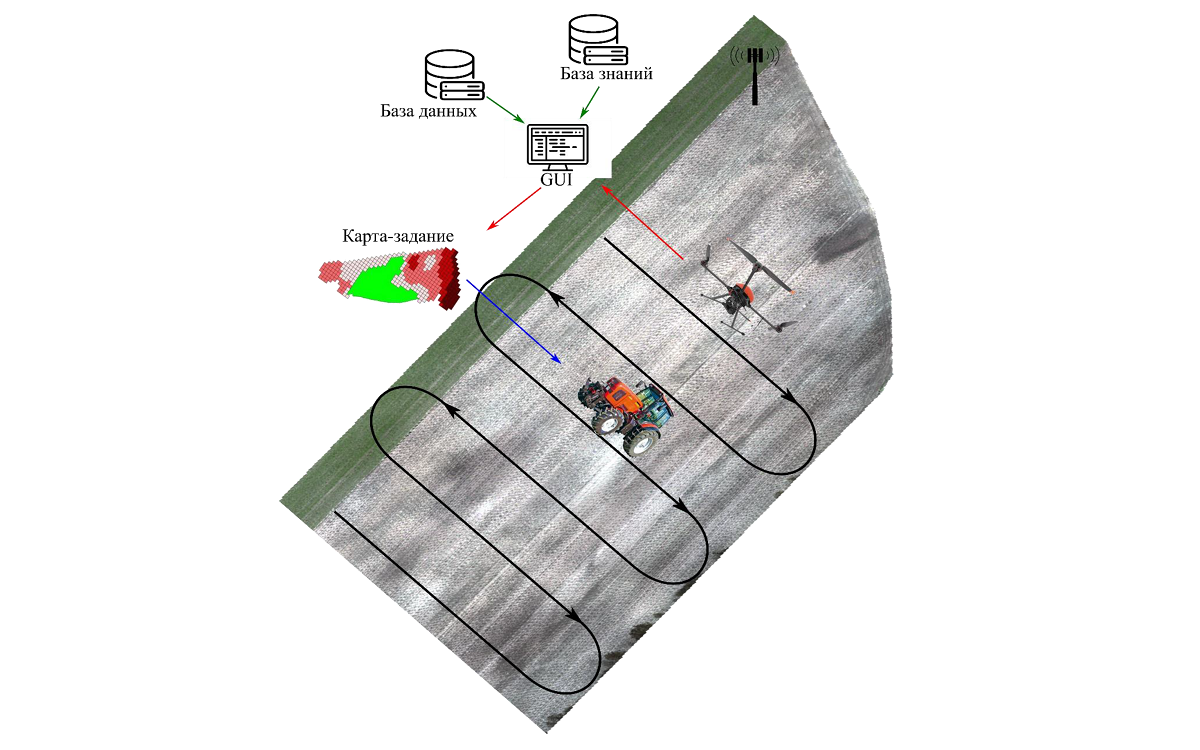
Рисунок 6. Реализация дифференцированной технологии внесения удобрений
Заключение
Таким образом, предложенный комплекс подходов к сопровождению технологий точного земледелия состоит из двух аспектов: информационный и инструментальный. В качестве исходных данных используются предобработанные ортофотопланы сельскохозяйственных территорий. Методы выделения однородных зон на снимках позволяют в дальнейшем построить карты-задания, на основе которых дифференцированно вносится удобрение.
К основной инструментальной составляющей относятся: БЛА, позволяющий оперативно собрать высококачественные исходные данные; система параллельного вождения, обеспечивающая эффективный охват территории.
Кроме того, в комплексе предусматриваются такие элементы, как интеллектуальная система для обработки аэрофотоснимков и построения карт-заданий, база данных, база знаний и т.п.
Авторы статьи: Е.П. Митрофанов, О.А. Митрофанова
Опубликовано в International agricultural journal, 2022, №5, 837-856.